电话
+86-13073105066
电子邮件邮件
admin@longshubearing.com







产品展示





































机器人和机械手用轴承
机器人轴承是工业机器人的关键部件。它们主要用于机械手关节、旋转单元和精密转台。它们的特性直接影响机器人的平稳运行、可重复定位和操作可靠性。
描述
标记
产品说明
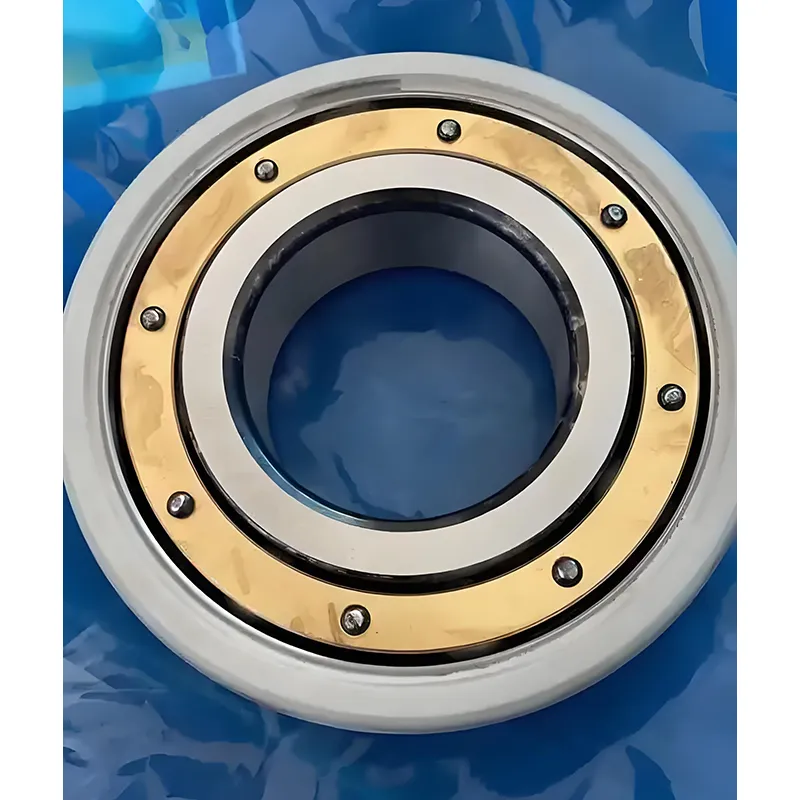
机器人轴承是工业机器人的关键部件。它们主要用于机械手关节、旋转单元和精密转台。它们的特性直接影响机器人的平稳运行、可重复定位和操作可靠性。主要类型包括交叉滚子轴承、薄壁轴承、波动齿轮轴承和滑动轴承。其中,交叉滚子轴承由于能够同时吸收径向载荷和轴向载荷以及倾覆力矩而占据主导地位。一些产品采用氮化硅陶瓷珠和超精表面处理等技术来提高性能。
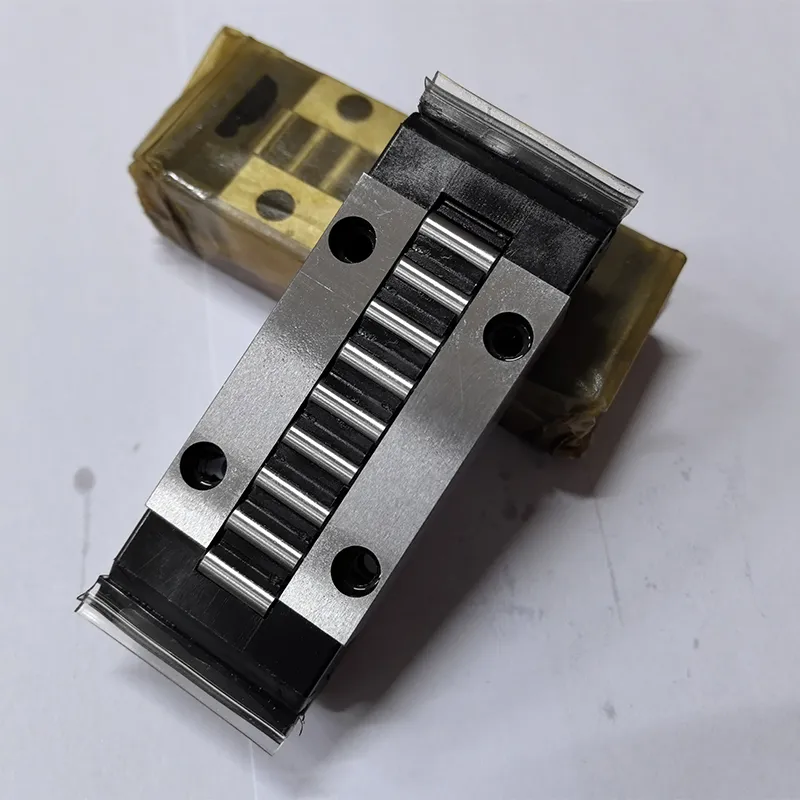
工业机器人轴承主要分为薄壁等径轴承、交叉滚子轴承、波动齿轮轴承、滑动轴承、RV齿轮轴承,以及电机轴承和丝杠轴承。
设计技术
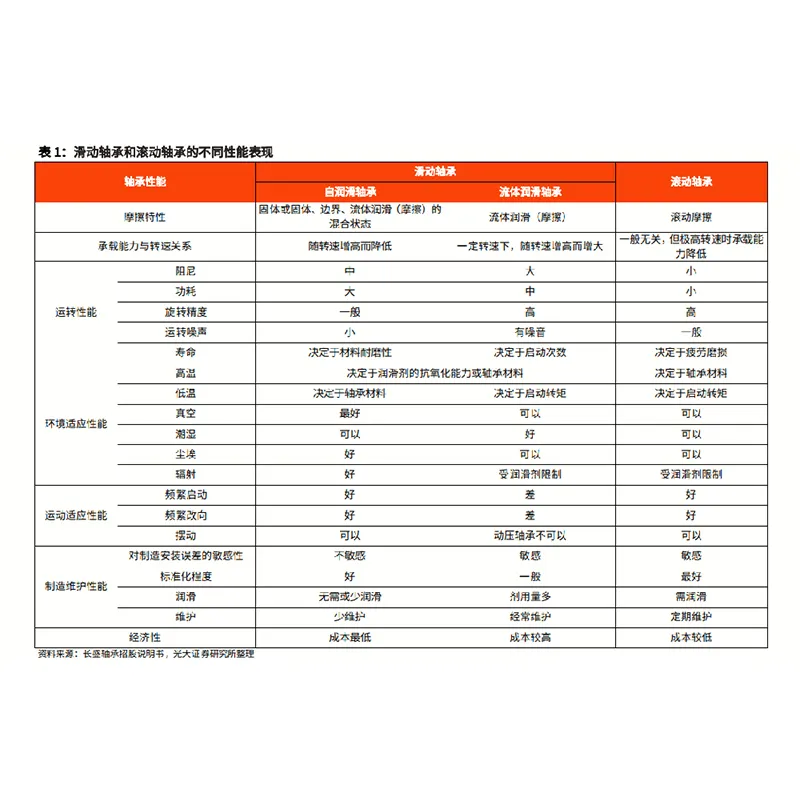
工业机器人轴承的设计原则应提供多标准优化,其中三个指标作为目标函数:额定动载荷能力、刚度和摩擦力矩。关键技术包括滚动接触理论、动载荷分析、热分析和可靠性评估。滚动接触理论描述了滚动表面的接触应力和变形行为,可以预测轴承的疲劳寿命和承载能力。动载荷分析对动载荷条件下轴承的性能进行建模。热分析使您能够预测轴承中的温度分布和热应力,确保其在高温下的稳定性和可靠性。基于概率模型和统计分析的可靠性评估使您能够预测和预防潜在的故障。
制造技术及精密加工
机器人轴承生产的关键技术包括:薄壁轴承负游隙精确控制技术;薄壁角接触球轴承安装高度的控制;薄壁轴承装配技术;非接触式测量薄壁轴承套圈内外径的技术。具体工艺还包括:基于磨削加工硬化层控制的轴承套圈精磨技术;热等静压,可将轴承内的残余应力降低60%;可控气氛淬火,确保变形控制在0.02毫米以内。
")
")
")
")
联系我们
相关热门产品



